Approximating using the CompEcon toolbox
Contents
Approximating using the CompEcon toolbox¶
Randall Romero Aguilar, PhD
This demo is based on the original Matlab demo accompanying the Computational Economics and Finance 2001 textbook by Mario Miranda and Paul Fackler.
Original (Matlab) CompEcon file: demapp00.m
Running this file requires the Python version of CompEcon. This can be installed with pip by running
!pip install compecon --upgrade
Last updated: 2021-Oct-01
Initial tasks¶
import numpy as np
import matplotlib.pyplot as plt
from compecon import BasisChebyshev,nodeunif
from matplotlib import cm
Univariate approximation¶
Approximating the function \(f(x) = e^{-2x}\). Its derivative is \(f'(x) = -2e^{-2x}\)
f1 = lambda x: np.exp(-2 * x)
d1 = lambda x: -2 * np.exp(-2 * x)
Fit approximant¶
The CompEcon toolbox defines the BasisChebyshev class for Chebyshev interpolation. Its positional arguments are n (number of nodes), a (lower bound) and b (upper bound). The optional keyword argument f indicates a function (the lambda f1 in our example) to be approximated.
n, a, b = 10, -1, 1
f1fit = BasisChebyshev(n, a, b, f=f1)
Here, f1fit is an instance of the BasisChebyshev class. Once a function is specified (as with the keyword argument f above), it can be evaluated at a given vector x by calling f1fit as any other function
f1fit(x) # returns a vector containing the interpolation of each element of x
f1fit() # without arguments, it evaluates the function at the basis nodes
When a function is specified with the option f, the BasisChebyshev object computes the interpolation coefficients \(c = \Phi(x)^{-1}f(x)\), where \(x\) represent the nodes of bhe basis. Alternatively, if the values fx of the function at the nodes are available (instead of the function itself, as is usually the case), then the basis is created by:
BasisChebyshev(n, a, b, y=fx)
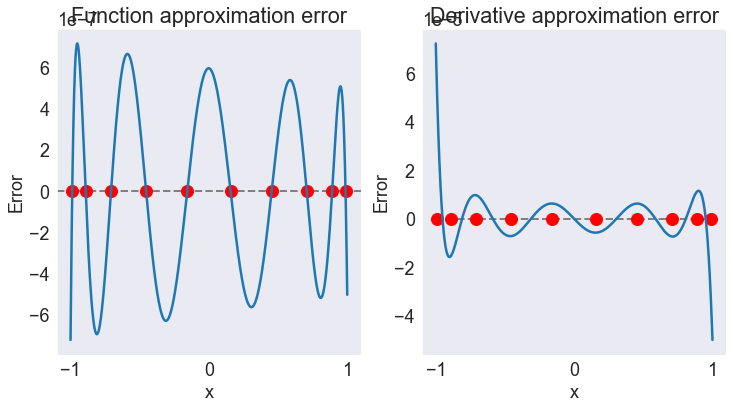
Graph approximation error for function and derivative¶
To evaluate the precission of the interpolation, we compare the the fitted function f1fit to the true values f1 over a grid of 1001 points. We do the same for the derivative function.
In the figures, the red dots represent the 10 interpolation nodes (where residuals equal zero, by construction). These are returned by the .nodes attribute of the basis.
axopts = {'xlabel': 'x', 'ylabel': 'Error', 'xticks': [-1, 0, 1]}
x = np.linspace(a, b, 1001)
fig = plt.figure(figsize=[12, 6])
ax1 = fig.add_subplot(121, title='Function approximation error', **axopts)
ax1.axhline(linestyle='--', color='gray', linewidth=2)
ax1.plot(f1fit.nodes, np.zeros_like(f1fit.nodes), 'ro', markersize=12)
ax1.plot(x, f1fit(x) - f1(x))
ax2 = fig.add_subplot(122, title='Derivative approximation error', **axopts)
ax2.plot(x, np.zeros_like(x), '--', color='gray', linewidth=2)
ax2.plot(f1fit.nodes, np.zeros_like(f1fit.nodes), 'ro', markersize=12)
ax2.plot(x, f1fit(x, 1) - d1(x))
[<matplotlib.lines.Line2D at 0x1e8c2be5f70>]
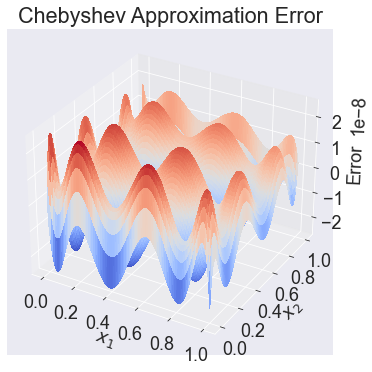
Bivariate Interpolation¶
Approximating the function \(f(x_1, x_2) = \dfrac{\cos(x_1)}{e^{x_2}}\).
f2 = lambda x: np.cos(x[0]) / np.exp(x[1])
Set degree and domain interpolation¶
The BasisChebyshev class can also interpolate d-dimensional functions. If one of the positional arguments is a scalar (like the bounds below), it is assumed that the same value holds in every dimension.
n, a, b = 7, 0.0, 1.0
f2fit = BasisChebyshev([n, n], a, b, f=f2)
By default, multidimensional interpolation is done by taking the tensor product of each dimension. Other options are available with the keyword method, as in:
BasisChebyshev(n, a, b, method='smolyak', qn=3, qp= 3) # for Smolyak interpolation
BasisChebyshev(n, a, b, method='complete', qp=2) # for complete polynomials
BasisChebyshev(n, a, b, method='tensor') # tensor product (default)
Notice that Smolyak and complete polynomials interpolation require the setting of keywords qn and qp, to control node and polynomial selection, respectively.
Nice plot of function approximation error¶
Now evaluate the residuals over a 101 by 101 grid.
nplot = [101, 101]
x = nodeunif(nplot, a, b)
x1, x2 = x
error = f2fit(x) - f2(x)
error.shape = nplot
x1.shape = nplot
x2.shape = nplot
fig = plt.figure(figsize=[15, 6])
ax = fig.gca(projection='3d', title='Chebyshev Approximation Error',
xlabel='$x_1$', ylabel='$x_2$', zlabel='Error')
ax.plot_surface(x1, x2, error, rstride=1, cstride=1, cmap=cm.coolwarm,
linewidth=0, antialiased=False)
<mpl_toolkits.mplot3d.art3d.Poly3DCollection at 0x1e8c2c5cfa0>
Compute partial derivatives¶
Partial derivatives can be computed by calling a BasisChebyshev object, indicating the order of derivatives by a second argument order, as in
f2fit(x, order)
Notice that unlike the MATLAB version of CompEcon, in this Python version the first index of x indicates the dimension, while the last index indicates an “observation” (evaluation point). Something similar applies to the order parameter: order[i, j] indicates the order of differentiation with respect to i in evaluation j.
x = np.array([[0.5], [0.5]])
order = [[1, 0, 2, 1, 0],
[0, 1, 0, 1, 2]]
ff = f2fit(x, order)
print(('x = [0.5, 0.5]\n' +
'f1 = {:7.4f}\n' +
'f2 = {:7.4f}\n' +
'f11 = {:7.4f}\n' +
'f12 = {:7.4f}\n' +
'f22 = {:7.4f}').format(*ff))
x = [0.5, 0.5]
f1 = -0.2908
f2 = -0.5323
f11 = -0.5323
f12 = 0.2908
f22 = 0.5323