Public Renewable Resource Model
Contents
Public Renewable Resource Model¶
Randall Romero Aguilar, PhD
This demo is based on the original Matlab demo accompanying the Computational Economics and Finance 2001 textbook by Mario Miranda and Paul Fackler.
Original (Matlab) CompEcon file: demdp01.m
Running this file requires the Python version of CompEcon. This can be installed with pip by running
!pip install compecon --upgrade
Last updated: 2022-Oct-23
About¶
Welfare maximizing social planner must decide how much of a renewable resource to harvest.
States
s quantity of stock available
Actions
q quantity of stock harvested
Parameters
\(\alpha\) growth function parameter
\(\beta\) growth function parameter
\(\gamma\) relative risk aversion
\(\kappa\) unit cost of harvest
\(\delta\) discount factor
import numpy as np
import matplotlib.pyplot as plt
from compecon import BasisChebyshev, DPmodel, DPoptions, qnwnorm
Model parameters¶
α, β, γ, κ, δ = 4.0, 1.0, 0.5, 0.2, 0.9
Steady-state¶
The steady-state values for this model are
sstar = (α**2 - 1/δ**2)/(2*β) # steady-state stock
qstar = sstar - (δ*α-1)/(δ*β) # steady-state action
print('Steady-State')
print(f"\t{'Stock':12s} = {sstar:8.4f}")
print(f"\t{'Harvest':12s} = {qstar:8.4f}")
Steady-State
Stock = 7.3827
Harvest = 4.4938
Numeric results¶
State space¶
The state variable is s=”Stock”, which we restrict to \(s\in[6, 9]\).
Here, we represent it with a Chebyshev basis, with \(n=8\) nodes.
n, smin, smax = 8, 6, 9
basis = BasisChebyshev(n, smin, smax, labels=['Stock'])
Action space¶
The choice variable q=”Harvest” must be nonnegative.
def bounds(s, i=None, j=None):
return np.zeros_like(s), s[:]
Reward function¶
The reward function is the utility of harvesting \(q\) units.
def reward(s, q, i=None, j=None):
u = (q**(1-γ))/(1-γ)-κ*q
ux= q**(-γ)-κ
uxx = -γ*q**(-γ-1)
return u, ux, uxx
State transition function¶
Next period, the stock will be equal that is \(s' = \alpha (s-q) - 0.5\beta(s-q)^2\)
def transition(s, q, i=None, j=None, in_=None, e=None):
sq = s-q
g = α*sq - 0.5*β*sq**2
gx = -α + β*sq
gxx = -β*np.ones_like(s)
return g, gx, gxx
Model structure¶
The value of wealth \(s\) satisfies the Bellman equation
To solve and simulate this model,use the CompEcon class DPmodel
model = DPmodel(basis, reward, transition, bounds,
x=['Harvest'],
discount=δ)
Solving the model¶
Solving the growth model by collocation
S = model.solve()
Solving infinite-horizon model collocation equation by Newton's method
iter change time
------------------------------
0 1.4e+01 0.0000
1 1.9e+01 0.0157
2 3.7e-01 0.0157
3 1.1e-03 0.0157
4 1.5e-08 0.0312
5 1.7e-14 0.0312
Elapsed Time = 0.03 Seconds
DPmodel.solve returns a pandas DataFrame with the following data:
S.head()
| Stock | value | resid | Harvest | |
|---|---|---|---|---|
| Stock | ||||
| 6.000000 | 6.000000 | 32.985613 | 6.795958e-09 | 3.349254 |
| 6.037975 | 6.037975 | 32.998722 | -1.561702e-09 | 3.379828 |
| 6.075949 | 6.075949 | 33.011736 | -5.604697e-09 | 3.410456 |
| 6.113924 | 6.113924 | 33.024658 | -6.686079e-09 | 3.441138 |
| 6.151899 | 6.151899 | 33.037489 | -5.868451e-09 | 3.471872 |
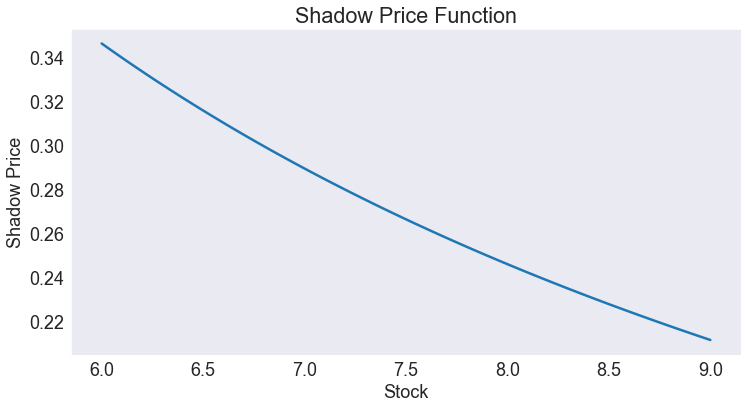
We are also interested in the shadow price of wealth (the first derivative of the value function).
S['shadow price'] = model.Value(S['Stock'],1)
Plotting the results¶
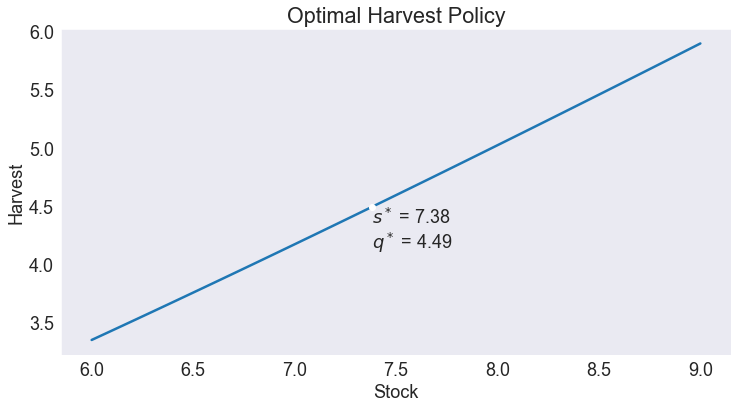
Optimal Policy¶
fig1, ax = plt.subplots()
ax.set(title='Optimal Harvest Policy', xlabel='Stock', ylabel='Harvest')
ax.plot(S['Harvest'])
ax.plot(sstar, qstar,'wo')
ax.annotate(f"$s^*$ = {sstar:.2f}\n$q^*$ = {qstar:.2f}",[sstar, qstar], va='top');
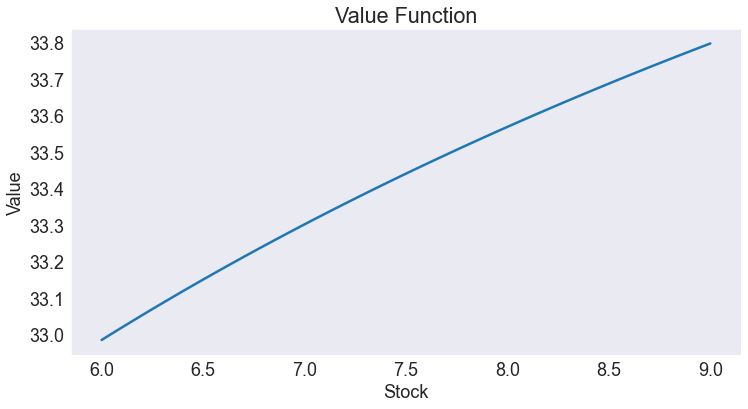
Value Function¶
fig2, ax = plt.subplots()
ax.set(title='Value Function', xlabel='Stock', ylabel='Value')
ax.plot(S.value);
Shadow Price Function¶
fig3, ax = plt.subplots()
ax.set(title='Shadow Price Function', xlabel='Stock', ylabel='Shadow Price')
ax.plot(S['shadow price']);
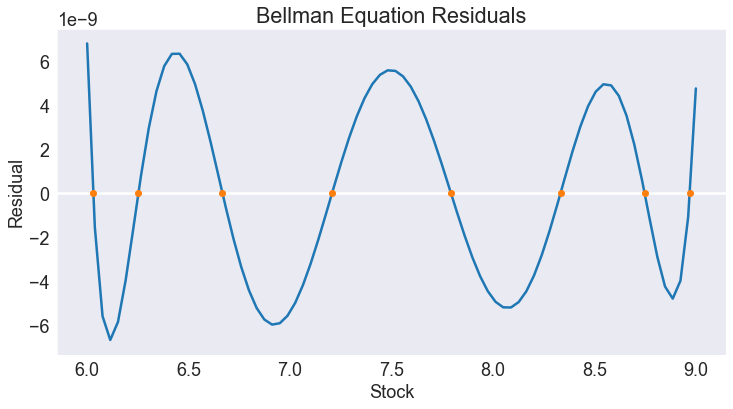
Residual¶
fig4, ax = plt.subplots()
ax.set(title='Bellman Equation Residuals', xlabel='Stock', ylabel='Residual')
ax.axhline(0,color='w')
ax.plot(S['resid'])
ax.plot(basis.nodes[0], np.zeros_like(basis.nodes[0]), lw=0, marker='.', ms=12)
ax.ticklabel_format(style='sci', axis='y', scilimits=(-1,1))
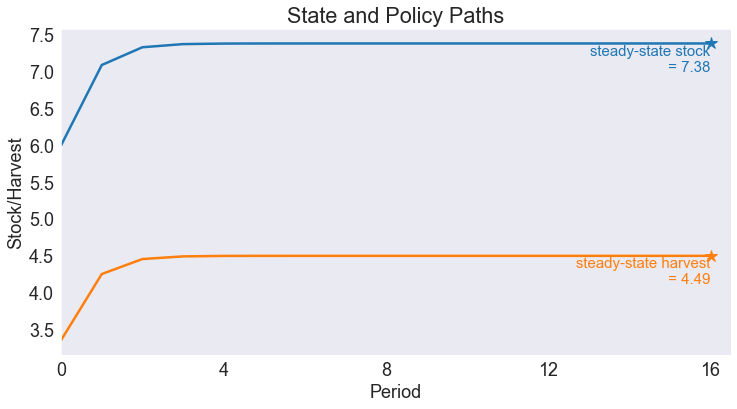
Simulating the model¶
We simulate 16 periods of the model starting from \(s=s_{\min}\)
T = 16
data = model.simulate(T, smin)
Simulated State and Policy Paths¶
opts = dict(ha='right', va='top', fontsize='small')
fig5, ax = plt.subplots()
ax.set(title='State and Policy Paths',
xlabel='Period',
ylabel='Stock/Harvest',
xlim=[0, T + 0.5],
xticks=range(0,T+1,4))
ax.plot(data[['Stock', 'Harvest']])
ax.plot(T, sstar, color='C0', marker='*', ms=12)
ax.annotate(f"steady-state stock\n = {sstar:.2f}", [T, sstar-0.01], color='C0', **opts)
ax.plot(T, qstar, color='C1', marker='*', ms=12)
ax.annotate(f"steady-state harvest\n = {qstar:.2f}", [T, qstar-0.01], color='C1', **opts);