Deterministic Production Adjustment Model
Contents
Deterministic Production Adjustment Model¶
Randall Romero Aguilar, PhD
This demo is based on the original Matlab demo accompanying the Computational Economics and Finance 2001 textbook by Mario Miranda and Paul Fackler.
Original (Matlab) CompEcon file: demdoc05.m
Running this file requires the Python version of CompEcon. This can be installed with pip by running
!pip install compecon --upgrade
Last updated: 2021-Oct-01
About¶
Profit maximizing firm must decide how rapidly to adjust production.
State
q current production rate
Control
x production adjustment rate
Parameters
𝛼 production cost constant
β production cost elasticity
γ adjustment cost parameters
p price
𝜌 continuous discount rate
Preliminary tasks¶
Import relevant packages¶
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from compecon import BasisChebyshev, OCmodel, NLP
Model parameters¶
𝛼 = 1.0 # production cost constant
β = 1.5 # production cost elasticity
γ = 4.0 # adjustment cost parameters
p = 1.0 # price
𝜌 = 0.1 # continuous discount rate
Approximation structure¶
n = 10 # number of basis functions
qmin = 0.2 # minimum state
qmax = 0.7 # maximum state
basis = BasisChebyshev(n, qmin, qmax, labels=['x']) # basis functions
Steady-state¶
qstar = (p/(𝛼*β)) ** (1/(β-1))
xstar = 0
vstar = (p * qstar - 𝛼 * qstar**β)/𝜌
steadystate = pd.Series([qstar, xstar],
index=['Production', 'Production adjustment rate'])
steadystate
Production 0.444444
Production adjustment rate 0.000000
dtype: float64
Solve HJB equation by collocation¶
def control(q, Vq, 𝛼, β, γ, p, 𝜌):
return Vq / γ
def reward(q, x, 𝛼, β, γ, p, 𝜌):
k = 𝛼 * q ** β
a = 0.5 * γ * x**2
return p*q - k - a
def transition(q, x, 𝛼, β, γ, p, 𝜌):
return x
model = OCmodel(basis, control, reward, transition, rho=𝜌, params=[𝛼, β, γ, p, 𝜌])
data = model.solve()
Solving optimal control model
iter change time
------------------------------
0 1.3e+00 0.0030
1 8.8e-02 0.0030
2 4.1e-02 0.0040
3 1.6e-02 0.0040
4 3.4e-03 0.0040
5 1.9e-04 0.0050
6 6.2e-07 0.0050
7 1.2e-11 0.0060
Elapsed Time = 0.01 Seconds
Plots¶
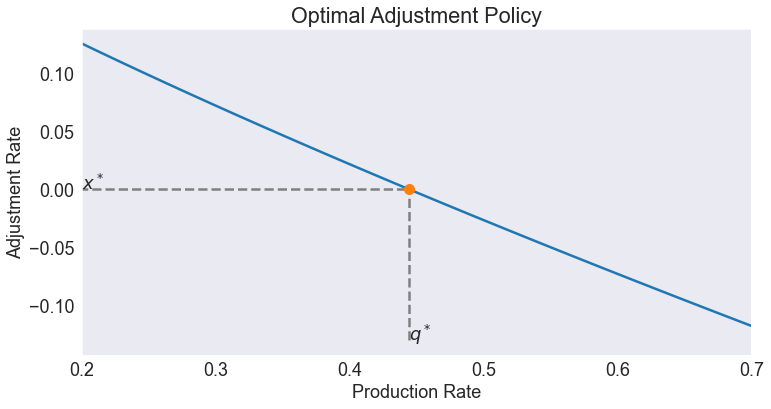
Optimal policy¶
fig, ax = plt.subplots()
data['control'].plot(ax=ax)
ax.set(title='Optimal Adjustment Policy',
xlabel='Production Rate',
ylabel='Adjustment Rate',
xlim=[qmin, qmax])
lb = ax.get_ylim()[0]
ax.hlines(xstar, 0, qstar, colors=['gray'], linestyles=['--'])
ax.vlines(qstar, lb, xstar, colors=['gray'], linestyles=['--'])
ax.annotate('$x^*$', (qmin, xstar))
ax.annotate('$q^*$', (qstar, lb))
ax.plot(qstar, xstar, '.', ms=20);
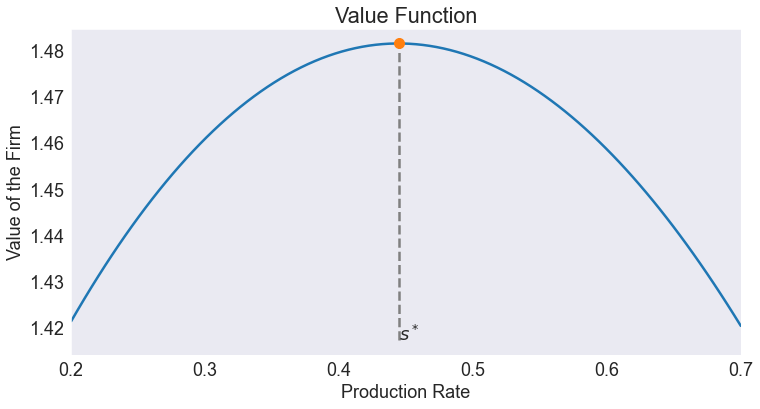
Value function¶
fig, ax = plt.subplots()
data['value'].plot(ax=ax)
ax.set(title='Value Function',
xlabel='Production Rate',
ylabel='Value of the Firm',
xlim=[qmin, qmax])
lb = ax.get_ylim()[0]
ax.vlines(qstar, lb , vstar, colors=['gray'], linestyles=['--'])
ax.annotate('$s^*$', (qstar, lb))
ax.plot(qstar, vstar, '.', ms=20);
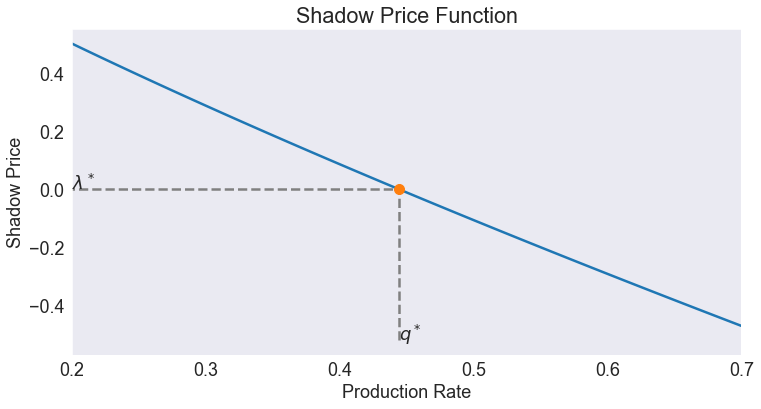
Shadow price¶
data['shadow'] = model.Value(data.index, 1)
fig, ax = plt.subplots()
data['shadow'].plot(ax=ax)
ax.set(title='Shadow Price Function',
xlabel='Production Rate',
ylabel='Shadow Price',
xlim=[qmin, qmax])
pstar = model.Value(qstar, 1)
lb = ax.get_ylim()[0]
ax.hlines(pstar, 0, qstar, colors=['gray'], linestyles=['--'])
ax.vlines(qstar, lb , pstar, colors=['gray'], linestyles=['--'])
ax.annotate('$\lambda^*$', (qmin, pstar))
ax.annotate('$q^*$', (qstar, lb))
ax.plot(qstar, pstar, '.', ms=20);
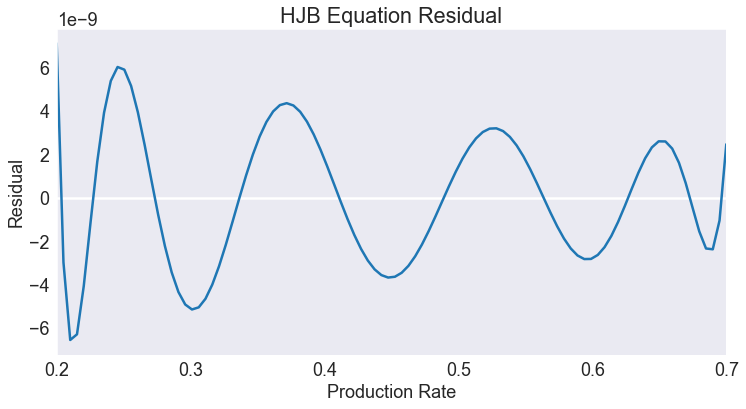
Residual¶
fig, ax = plt.subplots()
ax.axhline(0, c='white')
data['resid'].plot(ax=ax)
ax.set(title='HJB Equation Residual',
xlabel='Production Rate',
ylabel='Residual',
xlim=[qmin, qmax]);
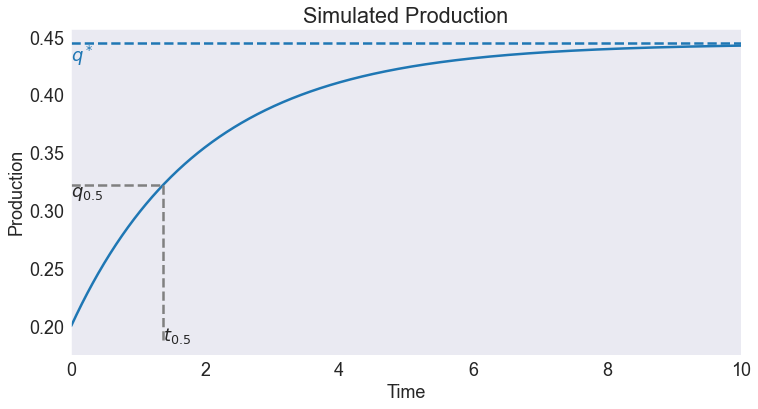
Simulate the model¶
Initial state and time horizon¶
q0 = 0.2 # initial production
T = 10 # time horizon
Simulation and plot¶
fig, ax = plt.subplots()
simulation = model.simulate([[q0]], T)
# Time to midway adjustment
qhalf = (q0 + qstar)/2
thalf = np.interp(qhalf, simulation['$y_0$'], simulation.index)
simulation['$y_0$'].plot(ax=ax)
ax.set(title='Simulated Production',
xlabel='Time',
ylabel='Production',
xlim=[0, T],
xticks=np.arange(0,T+1,2))
ax.axhline(qstar, ls='--', c='C0')
ax.annotate('$q^*$', (0, qstar), color='C0', va='top')
lb = ax.get_ylim()[0]
ax.vlines(thalf, lb , qhalf, colors=['gray'], linestyles=['--'])
ax.hlines(qhalf, 0 , thalf, colors=['gray'], linestyles=['--'])
ax.annotate('$t_{0.5}$', (thalf, lb))
ax.annotate('$q_{0.5}$', (0, qhalf),va='top')
ax.legend([]);
PARAMETER xnames NO LONGER VALID. SET labels= AT OBJECT CREATION