Procesos estocásticos
Contents
1.4. Procesos estocásticos#
Procesos estocásticos#
Un proceso estocástico es una secuencia temporal de variables aleatorias \(\{Y_t\}^\infty_{t=-\infty}\).
Dos tipos de procesos: Continuos ~ si sus realizaciones son tomadas de un intervalo de la recta real \(Y_t \in [a, b] \subseteq \mathbb{R}\).
- Discretos
si hay solamente un número contable de realizaciones \(Y_t \in \{y_1, y_2, \dots, y_n\}\).
También llamado proceso generador de datos.
Procesos estocásticos i.i.d.#
Los elementos de un proceso estocástico son idéntica e indepedientemente distribuidos (abreviado “iid”), si la distribución de probabilidad es la misma para cada miembro del proceso \(Z_t\) e independiente de las realizaciones de otros miembros del proceso.
En este caso, para la muestra \(\{Y_t\}^T_{t=1}\):
Momentos incondicionales#
Función de distribución acumulada incondicional
\[\begin{equation*} F_{Y_t}\left(y\right) = \Prob\left[Y_t\leq y\right] \end{equation*}\]Esperanza (media) incondicional
\[\begin{equation*} \mu_t\equiv \E\left(Y_t\right) = \int_{-\infty}^{\infty}y\dd F_{Y_t}\left(y\right) \end{equation*}\]Varianza incondicional
\[\begin{equation*} \gamma_{0t}\equiv \E\left(Y_t-\mu_t\right)^2 = \int_{-\infty}^{\infty}\left(y-\mu_t\right)^2 \dd F_{Y_t}\left(y\right) \end{equation*}\]Autocovarianza
\[\begin{equation*} \gamma_{jt}\equiv \E\left(Y_t-\mu_t\right)\left(Y_{t-j}-\mu_{t-j}\right) \end{equation*}\]
Estacionariedad#
Si la media \(\mu_t\) ni las autocovarianzas \(\gamma_{jt}\) dependen de la fecha \(t\), entonces decimos que el proceso \(Y_t\) es covarianza-estacionario o débilmente estacionario:
Ejemplo 1.5 Procesos estacionarios y no estacionarios#
Supongamos que \(Y_t\) es un proceso estocástico tal que \(Y_t \sim N(\mu_t, \sigma^2_t)\)
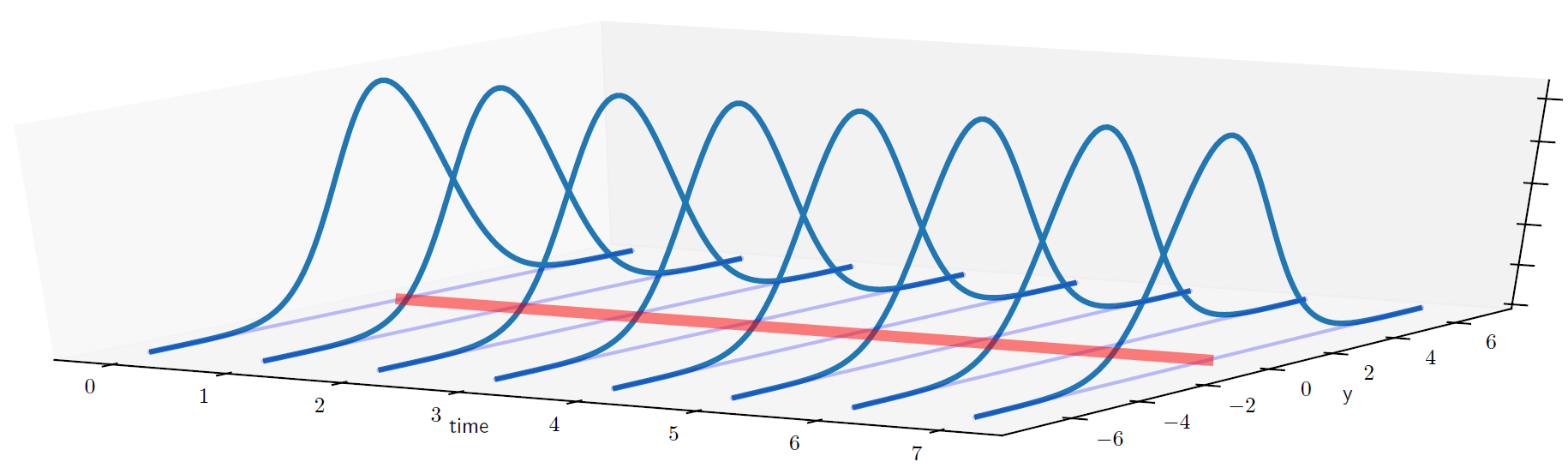
Fig. 1.2 Estacionario porque \(\mu_t\) y \(\sigma^2_t\) son constantes “)#
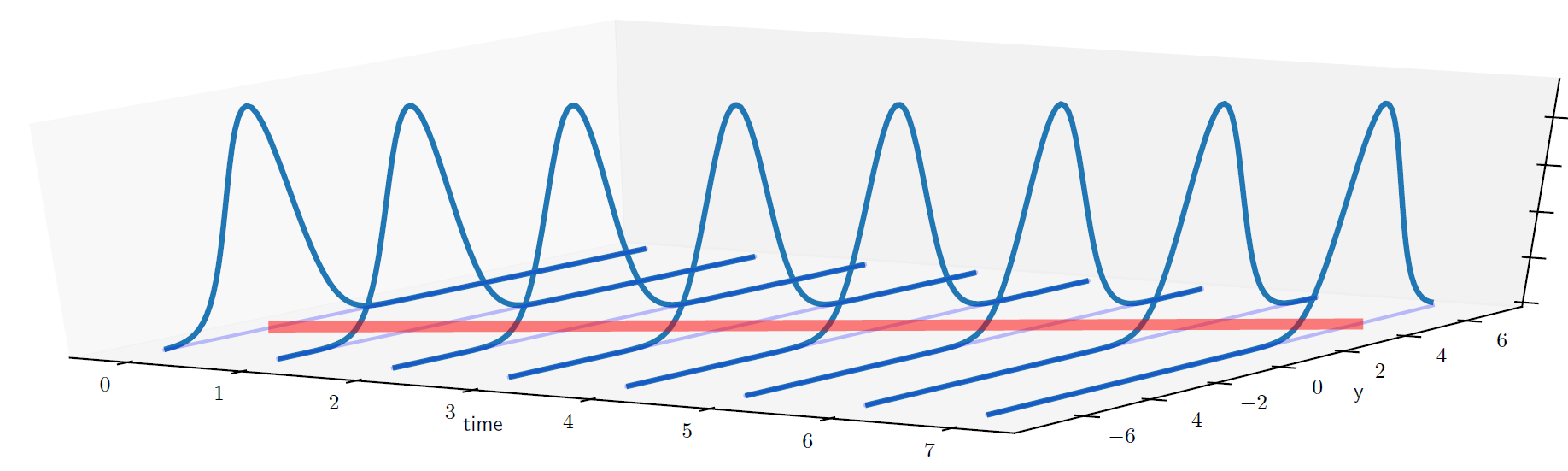
Fig. 1.3 No estacionario porque \(\mu_t\) está cambiando con el tiempo#
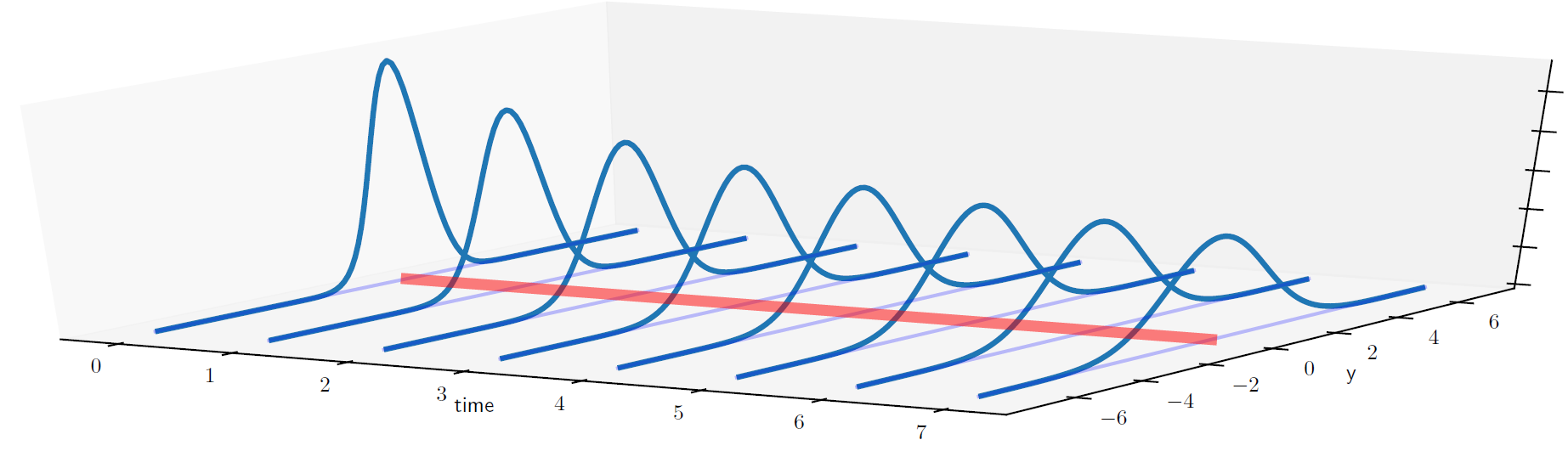
Fig. 1.4 No estacionario porque \(\sigma^2_t\) está cambiando con el tiempo#
Ruido blanco#
El bloque básico para construir los procesos considerados en este curso es una secuencia \(\left\{\epsilon_t\right\}\) cuyos elementos tienen media cero y varianza \(\sigma^2\),
Si los términos están normalmente distribuidos
entonces tenemos el proceso ruido blaco gaussiano.