Modelos AutoRegresivos de Media Móvil (ARMA)
3. Modelos AutoRegresivos de Media Móvil (ARMA)#
En esta clase
En esta clase aprenderemos a modelar series de tiempo en función de:
sus valores rezagados (procesos autorregresivos)
valores rezagados de un ruido blanco (procesos de media móvil)
Primero estudiamos las propiedades teóricas de procesos estocásticos.
Luego tratamos de identificar el PGD de nuestra serie a partir de sus estadísticos muestrales, comparándolos con los estadísticos de los procesos del punto anterior.
Finalmente, utilizamos nuestro modelo estimado para
análisis de escenarios: ¿qué pasaría con la serie de tiempo si recibe una perturbación estocástica de cierta magnitud (función impulso respuesta)
pronósticos: ¿qué valores esperamos ver en el futuro para esta serie de tiempo?
Modelos que estudiaremos
Es una secuencia \(\left\{\epsilon_t\right\}\) cuyos elementos satisfacen,
Sea \(\left\{\epsilon_t\right\}\) ruido blanco; el proceso estocástico
con \(\theta_q \neq 0\) es llamado un proceso MA(q).
Sea \(\left\{\epsilon_t\right\}\) ruido blanco; el proceso estocástico
con \(\phi_p \neq 0\) es llamado un proceso AR(p).
Sea \(\left\{\epsilon_t\right\}\) ruido blanco; el proceso estocástico
es llamado proceso ARMA(p,q).
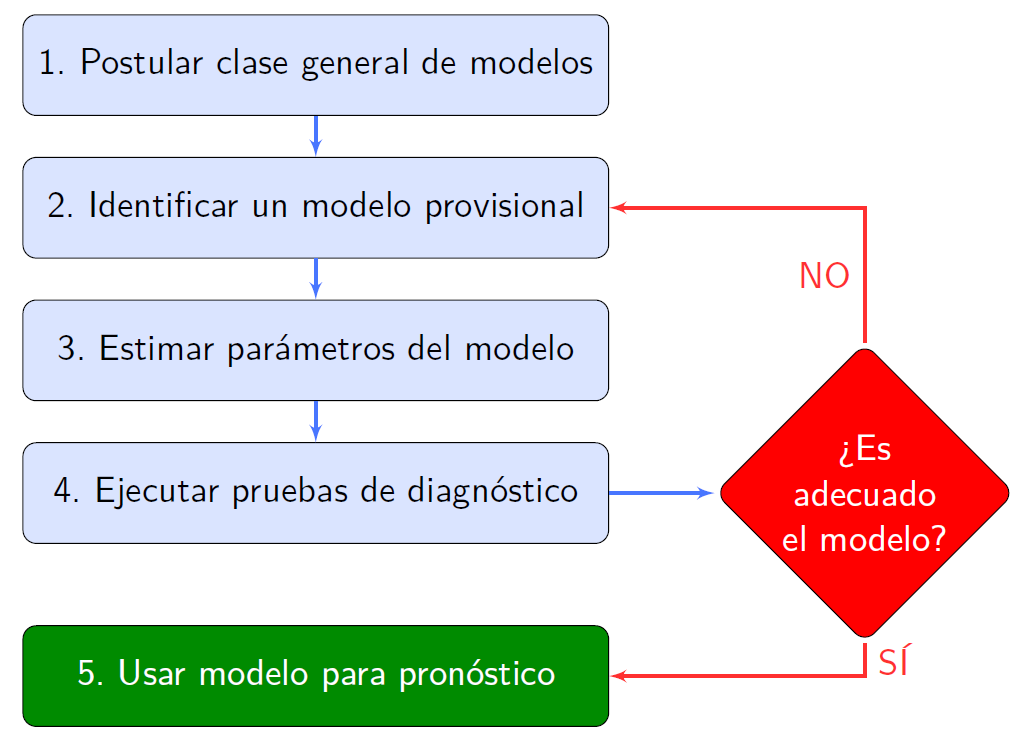
La metodología Box-Jenkins
Acerca de los ejemplos
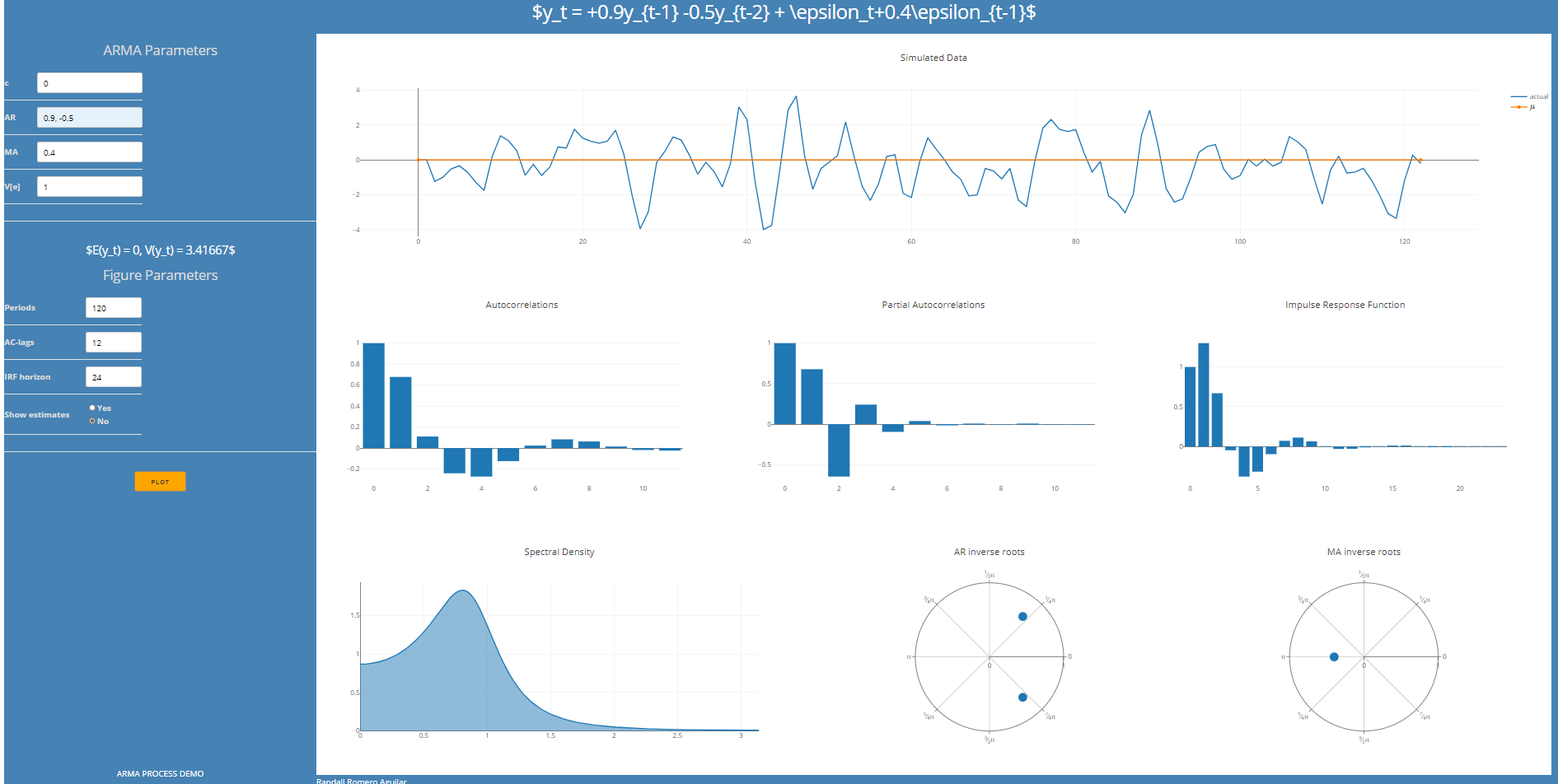
En esta clase veremos ilustraciones de distintos proceso AR, MA, y ARMA.
Usted puede reproducirlas (y estudiar más casos específicos de estos procesos) con el paquete macrodemos que escribí en Python para este tema.
Para instalarlo, en una ventana de sistema:
pip install macrodemos
Para ejecutarlo:
from macrodemos import ARMA_demo
ARMA_demo()