Estimación
Contents
import numpy as np
import matplotlib.pyplot as plt
import seaborn
import pandas as pd
from statsmodels.tsa.api import VAR
np.random.seed(1995)
8.3. Estimación#
Especificación de un VAR#
Para especificar un VAR, hay dos cosas que escoger:
Las \(n\) series que conforman el VAR
El número \(p\) de rezagos a ser incluidos en el modelo
En contraste con la metodología de Box-Jenkins, el modelo VAR no es parsimonioso \(\Rightarrow\) un VAR está sobreparametrizado:
hay \(n + pn^2\) parámetros.
muchos de sus coeficientes no son significativos
regresores posiblemente son altamente colineales, estadísticos \(t\) no confiables.
No obstante, en un VAR los coeficientes individuales no son de interés. Interesa determinar la dinámica del modelo (impulso respuesta) y la causalidad (Granger, que estudiaremos en la siguiente sección).
Estimación de un VAR#
El VAR reducido es un sistema de ecuaciones SUR, donde todas las ecuaciones tienen los mismos regresores.
Por lo tanto, la estimación OLS ecuación por ecuación es insesgada, eficiente y consistente.
La matriz de covarianza de los errores se estima a partir de los residuos
Estimación de un VAR no estacionario#
Si las series son I(1), ¿hay que diferenciarlas para estimar el VAR? Hay un debate respecto:
En este ejemplo simulamos realizaciones del VAR(1)
que puede escribirse
y las utilizamos para estimar los párametros originales por OLS. El objetivo es ilustrar que este estimador está insesgado y que es consistente.
# Funciones auxiliares:
# Definimos las matrices de parámetros $\Phi$ y $\Omega$. Declaramos dos funciones: para simular una muestra de observaciones del VAR, y otra para estimar los coeficientes de $\Phi$ a partir de tales simulaciones.
Φ = np.array([[0.8, 0.7], [-0.2, 0.5]])
param_names = ['$Φ_{11}$', '$Φ_{21}$', '$Φ_{12}$', '$Φ_{22}$']
sigma = 0.9
def var_sample(T = 100):
''' Simula el VAR(1) T períodos'''
Y = np.zeros((T,2))
for t in range(1, T):
Y[t] = Y[t-1] @ Φ.T + sigma * np.random.randn(2) # transpuesta es más rápido
return pd.DataFrame(Y, columns=['x', 'y'])
def Φ_ols(data):
'''Estima un VAR(1) a partir de datos, retorna coeficientes como vector'''
return VAR(data).fit().coefs[0].flatten()
La estimación OLS de un VAR es insesgada
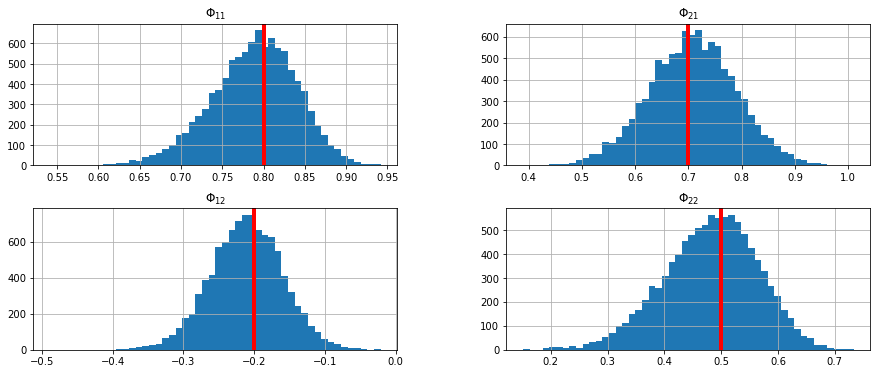
Con un experimento de Monte Carlo obtenemos 10000 muestras de \(T=100\) observaciones del VAR. Para cada muestra estimamos el VAR y colectamos los coeficientes estimados.
%%time
nrepetitions = 10_000
estimates = pd.DataFrame(
[Φ_ols(var_sample()) for _ in range(nrepetitions)], columns=param_names)
estimates.head()
CPU times: total: 58.1 s
Wall time: 58.7 s
| $Φ_{11}$ | $Φ_{21}$ | $Φ_{12}$ | $Φ_{22}$ | |
|---|---|---|---|---|
| 0 | 0.691685 | 0.679327 | -0.276123 | 0.428017 |
| 1 | 0.779543 | 0.763695 | -0.186702 | 0.584590 |
| 2 | 0.827301 | 0.837952 | -0.278445 | 0.444311 |
| 3 | 0.826135 | 0.791333 | -0.343680 | 0.382260 |
| 4 | 0.819778 | 0.615994 | -0.153597 | 0.315891 |
Luego graficamos la distribución de cada columna (estimaciones de uno de los parámetros) con un histograma. Observe cómo la distribución estimada está centrada alrededor del verdadero parámetro en cada uno de los gráficos.
ax = estimates.hist(bins=50,figsize=[15,6])
for i in range(2):
for j in range(2):
ax[i,j].axvline(x=Φ[i,j],linewidth=4, color='r')
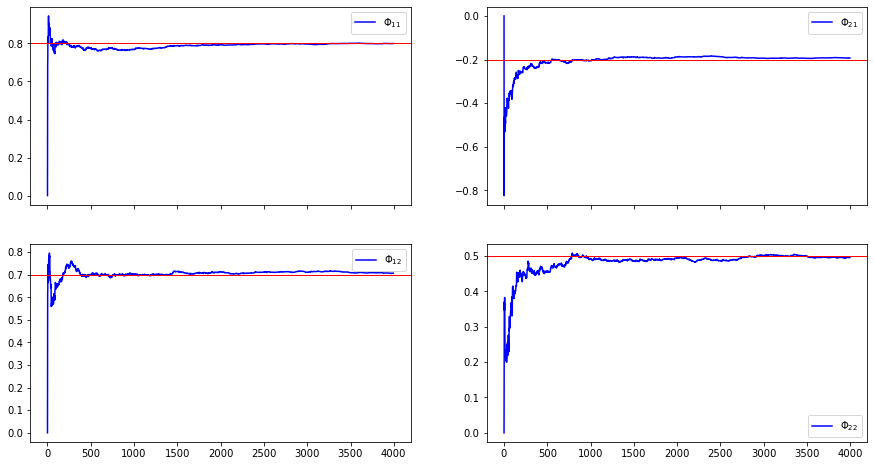
La estimación OLS de un VAR es consistente
Para ilustrar que la estimación OLS de un VAR es consistente, simulamos una sola muestra de datos y vamos agregando una nueva observación. En cada paso estimamos el VAR con OLS. Observe que conforme aumenta el número de observaciones, los valores estimados convergen a los parámetros poblacionales.
xlag = np.zeros([2,1])
XpX = np.zeros([2,2])
XpY = np.zeros([2,2])
T = 4000
minT = 5
Xest = np.zeros([T+1, 4])
for t in range(T+1):
x = Φ @ xlag + sigma * np.random.randn(2,1)
XpX += np.outer(xlag, xlag)
XpY += np.outer(xlag, x)
xlag = x.copy()
if t>minT:
Xest[t] = np.linalg.solve(XpX/t, XpY/t).flatten()
estimates2 = pd.DataFrame(Xest[minT:], columns=param_names)
ax = estimates2.plot(color='b',figsize=[15,8],subplots=True, layout=[2,2])
for i in range(2):
for j in range(2):
ax[i,j].axhline(y=Φ[j,i],linewidth=1, color='r')
Escogiendo el óptimo número de rezagos del VAR#
La selección del número de rezagos \(p\) es crítica.
Una opción: dejar que \(p\) difiera para cada ecuación y variable \(\Rightarrow\) el VAR no podría estimarse con OLS.
Por tanto, se determina un sólo \(p\) para todas las variables y ecuaciones, usando dos enfoques distintos
Descartando los últimos rezagos si no son significativos
Utilizando un criterio de selección que contraponga el ajuste a los grados de libertad.
Escogiendo el \(p\) óptimo con pruebas de significancia#
Suponga que queremos decidir entre \(p\) y \(q\) número de rezagos, con \(q<p\).
Obtenemos \(\hat{\Omega}\) para ambos modelos, usando la misma muestra.
Comprobamos la significancia conjunta de los rezagos \(q+1,\dots,p\) con la prueba de razón de verosimilitud
Si no se rechaza la hipótesis nula, puede escogerse \(q\) rezagos.
Limitaciones:
Resultado asintótico, pero muestras usualmente pequeñas
Resultado sensible a escogencia de \(p\) y \(q\).
Escogiendo el \(p\) óptimo con criterios de selección#
En la práctica, el número óptimo de rezagos se escoge minimizando el valor de AIC o de SBC:
donde \(N=n^2p+n\) es el número total de parámetros estimados
Rezagos adicionales reducen \(\hat{\Omega}\), pero incrementando \(N\)
Usando un VAR para describir los datos#
La práctica usual en el análisis VAR es reportar
pruebas de causalidad de Granger
funciones de impulso respuesta
descomposición de varianza del error de pronóstico
Usualmente no se reportan los coeficientes estimados ni el \(R^2\), porque no son tan informativos.
Causalidad de Granger#
Las pruebas de causalidad de Granger determinan si los valores rezagados de una variable ayudan a predecir otra variable.
Si los rezagos de \(A\) no ayudan a predecir \(B\), entonces coeficientes de los rezagos de \(A\) en la ecuación de \(B\) son ceros.
Si alguna variable no es causada en el sentido de Granger por ninguna otra, no implica que la variable sea exógena. Bien podría haber causalidad contemporánea.
En el modelo VAR(2) con variables \(y_t, m_t\):
las pruebas de causalidad de Granger son:
Hipótesis nula |
Restricciones |
|---|---|
\(m\) no causa \(y\) |
\(\alpha_{12} = \beta_{12} = 0\) |
\(y\) no causa \(m\) |
\(\alpha_{21} = \beta_{21} = 0\) |
Si se rechaza, por ejemplo, la primera hipótesis, decimos que \(m\) causa \(y\) en el sentido de Granger.